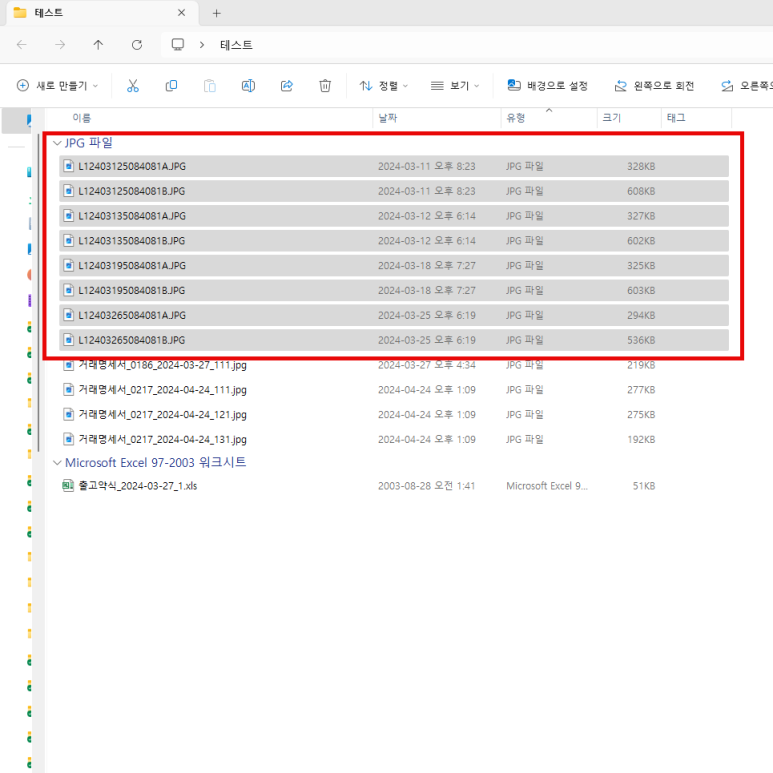
거래처에 출고 자료를 등록하고 나면, 동일한 이력번호를 가진 증명서들이 'A.JPG', 'B.JPG'와 같은 이미지 파일로 저장됩니다. 각 거...
안녕하세요 놀이치료사 버디입니다 자율성이 높은 자녀를 양육하기 위해 어릴 때부터 작은 일이라도 스스로 해내고 이를 책임졌던 경험은 매우 중요합니다✨ ⬇ 관련 포스팅...
전자책 서식의 비밀 EPUB vs PDF 전자책을 읽을 때 어떤 서식을 선호하시나요?. EPUB인가요, 아니면 PDF인가요?. 이 두 가지 서식은 각각 장단점이 있어 선택에 고민이...