안녕하세요! 에디터 미미짱입니다:D 오늘은 hwp/hwpx 파일 열기 방법부터 pdf 변환 방법까지 쉽고 빠르게 방법을 알려드릴게요! 요즘 대학교나 회사에서hwp/hwpx 파일...
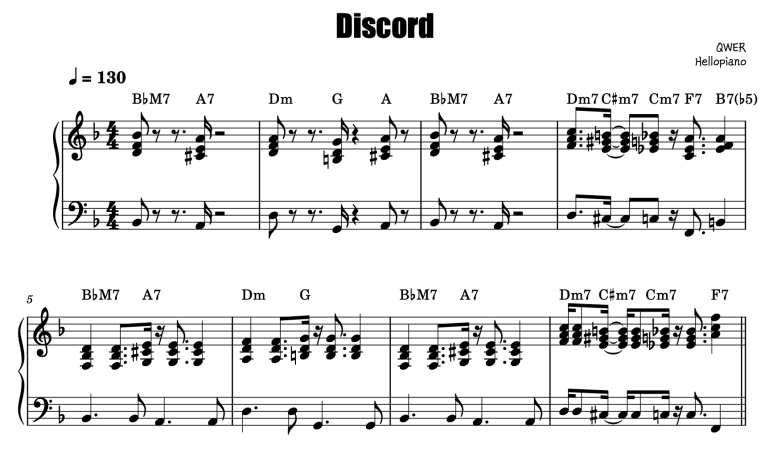
QWER - discord QWER는 김계란이 기획한 타마고 프로젝트에서 발굴된 신인 걸그룹 밴드인데요! 첫번째 앨범 수록곡 중 잔잔하면서 조용한 노래인 '별의 하모니...
안녕하세요, 써밋 글로벌지원센터입니다. 써밋 글로벌지원센터는 국내외 문서 제출을 위한 다국어 문서 번역 및 번역 공증 (촉탁 대행)등의 전문 통번역 서비스를 제공합니...